

Практика и вопросы метрологии работы автоматических постов весового и габаритного контроля автотранспорта
Сенянский М.В.
к.т.н,
Генеральный директор
ЗАО «ВИК «Тензо-М»
ПРАКТИКА И ВОПРОСЫ МЕТРОЛОГИИ РАБОТЫ АВТОМАТИЧЕСКИХ ПОСТОВ ВЕСОВОГО И ГАБАРИТНОГО КОНТРОЛЯ АВТОТРАНСПОРТА
Основной целью внедрения автоматических постов весового и габаритного контроля (АВГК) на дорогах общего пользования является их защита от разрушения большегрузными грузовыми автомобилями (АТС), движущимися с нарушениями предельно разрешенных осевых нагрузок и полной массы. Наша страна стала второй в мире, приступившей к внедрению АВГК на своих дорогах, когда данные автоматических весовых и габаритных измерений используются контролирующими структурами для вынесения постановлений о штрафовании без последующего «контрольного перевешивания».
Предельно малое время взвешивания, измеряемое миллисекундами, большое число помех различной физической природы, недостаточно глубокое понимание метрологической сути процесса его участниками, а также высокая социальная ответственность за результаты автоматических измерений, часто приводящих к большим штрафам, оговоренным соответствующими статьями КоАП, делают этот вид взвешивания АТС в движении, пожалуй, самым сложным в техническом и методическом плане, из известных на сегодня, процессом измерений [1].
1. Погрешности средства и результата измерений
Примерно четверть века назад в мире сложилось так, что для автоматического измерения осевых нагрузок АТС в движении стали использоваться безальтернативные, на тот момент, встраиваемые в дорогу линейные пьезоэлектрические датчики шириной в направлении движения всего 50 мм! Что в разы меньше пятна контакта шины колеса грузовика с поверхностью дороги (примерно 0,25 х 0,25м). При скоростях движения от 10 до 40 м/с (36…144 км/ч) время измерения составляет всего 7,5…30 мс (рис.1). Для того, чтобы за этот «малюсенький» интервал времени взять хотя бы сотню отсчетов и произвести с ними ряд необходимых математических действий, надо использовать вторичный преобразователь с частотой опроса не менее 15 кГц.
Объект измерений – АТС, характеризуемый рядом таких параметров, как тип, число осей, тип подвески, полная масса и распределение осевых нагрузок, физические свойства и размещение груза и т.д. – проносится по дороге над линейными датчиками, находясь, в общем случае, в сложном многопараметрическом колебательном процессе. Частота колебаний кузова (подрессоренной массы), зависящая от массы, типа и размещения груза, типа подвески согласно литературным данным составляет 1…3 Гц. Неподрессоренные элементы – оси с колесами, сами элементы подвески (рессоры, рычаги или пневмоподушки), привода тормозной системы и т.д. колеблются с большей частотой в диапазоне от 10 до 15 Гц. Частота колебаний элементов двигателя на его упругом подвесе от 10 до 60 Гц [2].
Учитывая то, что период колебаний наименьшей по частоте и наибольшей по амплитуде составляющей на один-два порядка превышает время единичного измерения динамических сил воздействия колес на дорогу, можно ожидать, что результат измерений будет в большой степени зависеть от амплитуды и формы колебаний. Дорожное полотно вносит существенный вклад в результат измерений, поскольку является и возбудителем, и гасителем колебаний проезжающих по нему АТС.
Наиболее существенными помехами являются неплоскостность и деформируемость поверхности дороги, нормируемые обычно государственными стандартами. Так, например, образование колеи приводит к возникновению удара при въезде колеса на линейный датчик и появлению дополнительной систематической составляющей погрешности измерения осевой нагрузки, а неплоскостность в продольном направлении к возбуждению колебаний всех частей АТС.
Многолетние исследования работы АВГК на опытном полигоне и в эксплуатации, их калибровки и поверки показывают, что погрешность результата измерений осевых нагрузок зависит не только от характеристик самого средства измерений, но и от двух других важных и неотъемлемых участников процесса – самого объекта измерений и дорожного покрытия. По нашему мнению, на долю СИ приходится не более одной пятой доли общей погрешности результата (рис.2), ограничиваемой знакомыми всем цифрами 5 и 10 (11)% для полной массы и осевых нагрузок соответственно [3], [4]. Тем не менее, подавляющее большинство заинтересованных лиц, включая и просвещенных европейских метрологов-идеологов WIM, относят их сегодня только к самому средству измерений.
Думаю, что в Государственном Реестре средств измерений невозможно найти ни одного прибора с числом делений меньше 10! Настолько грубого, скорее похожего на бытовой индикатор, диапазон измерения которого вмещает в себя величину предельной погрешности всего 9 раз! «Репутация» средства измерений здесь портится двумя упомянутыми выше «собратьями» по системе измерений –дорожным полотном и самим объектом взвешивания – АТС. Это понятно, поскольку дорога проектировалась и строилась как транспортный путь для автомобилей, а грузовик – как средство безопасной доставки полезной нагрузки из точки А в точку Б с минимальными временем и затратами. И никто не задумывался над тем, чтобы одновременно наделить их свойствами высококлассного средства измерений. В этой связи, в дальнейшем, в первую очередь при разработке стандарта на АВГК, следовало-бы дифференцировать погрешность СИ и погрешность результата измерений, обусловленную в большей степени участием в процессе компонентов системы, не наделенных изначально измерительными функциями.
2. Проблемы и задачи развития АВГК
Одной из главных проблем создания и эксплуатации АВГК сегодня является отсутствие Технического регламента или хотя-бы государственного стандарта на эти системы измерений. Все, чем сегодня должны руководствоваться разработчики и производители автоматических весогабаритных комплексов, изложено казенным телеграфным текстом в приказах двух министров, ведомства которых имеют не самое близкое отношение к метрологии. Изложенные требования базируются, в основном, на цифрах и параметрах, заимствованных у западных стран, начавших работы по АВГК двумя десятилетиями раньше.
В то же время, использованные зарубежные стандарты – американский [5] и европейский [6], иллюстрируют отсутствие у авторов необходимой глубины понимания метрологической сути процесса измерений. Складывается впечатление, что они не желают видеть различий между погрешностями СИ и результата процесса автоматических измерений. Ряд требуемых от АВГК величин погрешностей практически недостижим даже при статических контрольных измерениях. Например, требуемая погрешность ±6см измерения высоты, учитывая сложность внешних обводов ряда АТС, особенности работы подвески и используемые средства измерений.
На проблемы метрологического плана накладываются сложности, связанные с использованием в АВГК большинством наших фирм-инсталляторов импортного измерительного, коммуникационного и вычислительного оборудования. Среди которых, прежде всего линейные пьезоэлектрические датчики осевой нагрузки, лазерные сканеры габаритов двух известных швейцарских фирм, являющихся практически монопольными мировыми лидерами. Видеокамеры, коммуникационное и компьютерное оборудование доводят процент импортной комплектации до 85…95%.
Своеобразной «белой вороной» в этой сфере является компания «Тензо-М», использующая собственные силоизмерительные модули (СМ), собранные на тензорезисторных датчиках своей разработки и свои высокочастотные контролеры, позволяющие не только получать величину осевой нагрузки, но и видеть форму сигнала в процессе перемещения пятна контакта по датчику. Несомненным преимуществом тензометрических СМ является возможность измерений осевых нагрузок при скоростях движения, меньших 5…10 км/ч, и даже при полной остановке АТС. Еще одним важным преимуществом, касающимся и метрологов и перевозчиков, являются возможности статической калибровки системы путем наложения поверенных гирь по ГОСТ OIMLR-111 массой 0,5…2 т и демонстрации ее исправности заинтересованным сторонам наглядным простым и, самое главное, абсолютно легитимным с точки зрения метрологии способом.
3. Эталон динамической осевой нагрузки
Непрерывная практика мониторинга АВГК и показательных публичных демонстраций с участием перевозчиков, их профессиональных объединений и общественных организаций свидетельствует о необходимости создания для этих целей, а также для целей калибровки и поверки АВГК эталона динамической осевой нагрузки (ДОН). Ведь именно эта величина фактически измеряется встроенными в дорогу пьезоэлектрическими или тензометрическими линейными силоприемными модулями.
К сожалению, в настоящее время широкое распространение у нас получила нездоровая западная практика, когда результаты измерения ДОН предлагается сравнивать с опорными значениями осевых нагрузок, измеренными в статике на поосных весах. Мало того, что при многократном поосном статическом взвешивании многоосных АТС мы обычно убеждаемся в том, что разброс результатов измерений по каждой оси существенно превышает погрешность весов. Это объясняется перераспределением сил между осями, входящими в состав групп сближенных осей (тележек) [7], [8]. Но такое же перераспределение происходит непрерывно и в процессе движения АТС по дороге и, в том числе, в интервал времени, в течение которого происходит автоматическое измерений ДОН.
Интересно то, что в разделе 2 «Общие сведения: терминология» Международного стандарта NMi на WIM [6], вводится понятие «динамического усилия шины АТС, прилагаемого перпендикулярно к поверхности дороги - N», аналогичное ДОН. Однако, далее оно никак не используется, а все результаты динамических измерений предлагается сравнивать с опорными значениями «R», полученными на контрольных весах поосного взвешивания.
Наряду с изданием стандарта NMi, в той же Голландии был создан многоосный прицеп с, так называемыми, инструментальными осями, осевые (колесные) нагрузки на которые измеряются бортовой системой. Эти динамические силы могут быть синхронизированы с встроенными в асфальт силоприемными модулями и затем использоваться в качестве опорных (истинных) значений для оценки метрологических характеристик WIM. Следует сказать, что первый образец такого эталона осевых нагрузок недавно был создан и в России. Таким образом, лед тронулся!
Следующим этапом прозрения должно стать понимание того, что измеряемой АВГК (WIM) «впрямую» величиной является лишь динамическая осевая нагрузка или нагрузка на колесо. Полная масса, а также масса тележки (группы сближенных осей) находятся путем суммирования значений последовательно измеренных осевых нагрузок и при калибровке и поверке АВГК нет смысла ни проверять, ни поверять калькулятор.
По моему мнению, погрешность воспроизведения ДОН эталонным прицепом не должна превышать ±1…2 %. В таком случае, им можно будет поверять АВГК с погрешностью измерения осевых нагрузок АТС порядка 5…10 %. С целью уменьшения радиуса разворота и снижения времени и «холостого» пробега при калибровке, прицеп должен быть короткобазным, иметь не более двух осей, причем обе оси – инструментальные. Одна ось двух, а другая – односкатная. Это необходимо для оценки чувствительности силоприемного модуля к ширине и смещению полосы приложения измеряемой силы.
Область воспроизведения нагрузок (заштрихованная трапеция) эталоном динамической осевой нагрузки (ЭДОН) в координатах «скорость-осевая нагрузка» изображена на рис.3. С бортовой полезной нагрузкой в виде балласта или гирь класса М1 по ГОСТ OIMLR-111 общей массой порядка 15 т, максимальные значения воспроизводимой ДОН и скорости будут достигать 75%. Значение максимальной осевой нагрузки в 20 т прикладывается к СМ при нулевой скорости методом прямого нагружения гирями класса М1. Эта «роскошь» доступна лишь тензометрическим модулям. Работа АВГК на максимальной скорости без риска для безопасности движения реально может быть проверена лишь прокатом легких АТС (фургоны, пикапы и т.д.) с нагрузкой на ось порядка 2 т.
Следует подчеркнуть, что синхронизация процессов измерения эталонной динамической осевой нагрузки и нагрузки, измеряемой АВГК, рассматриваемым в данном случае в качестве рабочего средства измерения, должна осуществляться с погрешностью не хуже 1 мс.
Выводы
1. В ближайшее время необходимо разработать ГОСТ на автоматические системы весогабаритного контроля, регламентирующий технические условия на них и методику испытаний. При этом не следует «плестись в хвосте» западной метрологии, полностью включая их тексты в наш стандарт.
2. Эталон динамической осевой нагрузки необходим, как единственно достоверное средство для метрологических испытаний (в том числе, демонстрационных), калибровки и поверки АВГК. Он должен воспроизводить до 70% значений максимальной осевой нагрузки и скорости, быть максимально легким и маневренным, имея, максимум, две оси, причем обе - инструментальные.
3. Методику «показательных» выступлений при публичной демонстрации работы АВГК представителям заинтересованных сторон должны утвердить институты РОССТАНДАРТА. Она должна содержать два варианта – с использованием ЭДОН и традиционный - с прокатом контрольных АТС, взвешенных поосно на контрольных статических весах.
Список иллюстраций
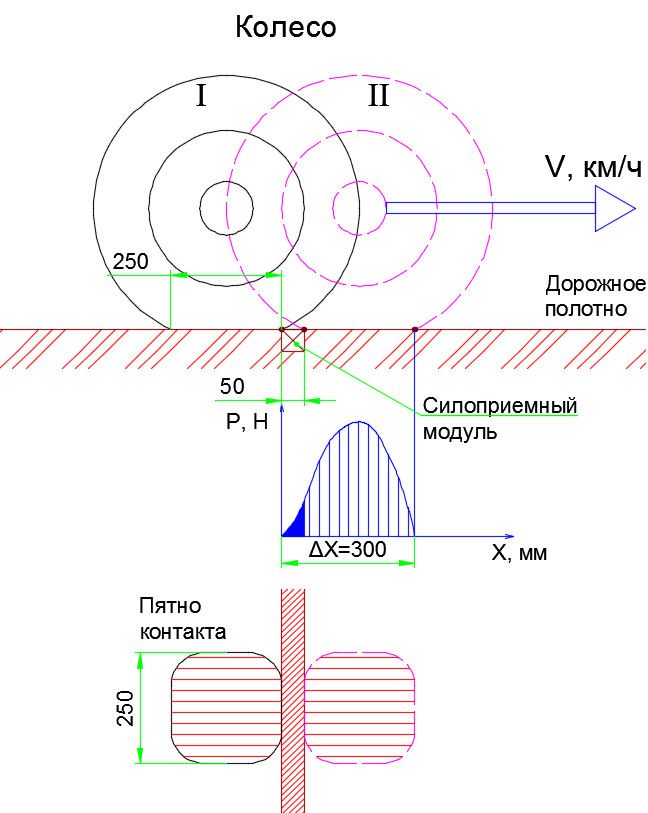
Рис. 1. Схема измерения осевой нагрузки АТС встроенным в дорогу линейным датчиком

Рис. 2. Слагаемые погрешности результата измерений осевой нагрузки, ее требуемый уровень и потенциал метода.
СИ – средство измерений,
АТС – автотранспортное средство,
ДП – дорожное покрытие
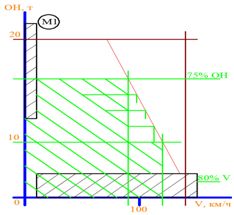
Рис. 3. Область воспроизведения эталонной динамической осевой нагрузки.
М1 – гири класса М1 по ГОСТ OIMLR-111 для V~ 0 км/ч
Список литературы:
1. Сенянский М.В. АВГК – практика и вопросы метрологии. Доклад на НПК «Весы-2018», г. Сочи, 2018г.
2. Степаненко А.И. Влияние свойств объекта измерений на определение весовых параметров транспортных средств в движении. Доклад на НПК «Весы-2018», г. Сочи, 2018г.
3. Об утверждении перечня измерений, относящихся к сфере государственного регулирования обеспечения единства измерений и обязательных метрологических требований к ним. Приказ МВД № 32 от 20 января 2015г.
4. Порядок осуществления весового и габаритного контроля транспортных средств, в том числе порядок организации пунктов весового и габаритного контроля транспортных средств. Приказ 119 от 29 марта 2018г.
5. Стандартные технические требованя к дорожным системам динамического взвешивания, включая требования к условиям эксплуатации и методы испытания. Стандарт ASTME-1318-09, США
6. Международный стандарт Нидерландского метрологического института (NMi) на WIM. Компания NMiCertin, Дордрехт, 2016г..
7. Сенянский М.В. Методологические особенности поосного взвешивания автомобилей. Законодательная и прикладная метрология № 1, 2013г..
8. Сенянский М.В. Актуальные вопросы метрологии весового контроля грузового автотранспорта. Приборы № 1 (199) 2017г.
декабрь 2018 года
Все права на публикацию принадлежат ЗАО «Весоизмерительная компания «Тензо-М».
Перепечатка или использование материалов – только с согласия автора!